Biodiversität. Nachhaltigkeit. Mikrofarming.
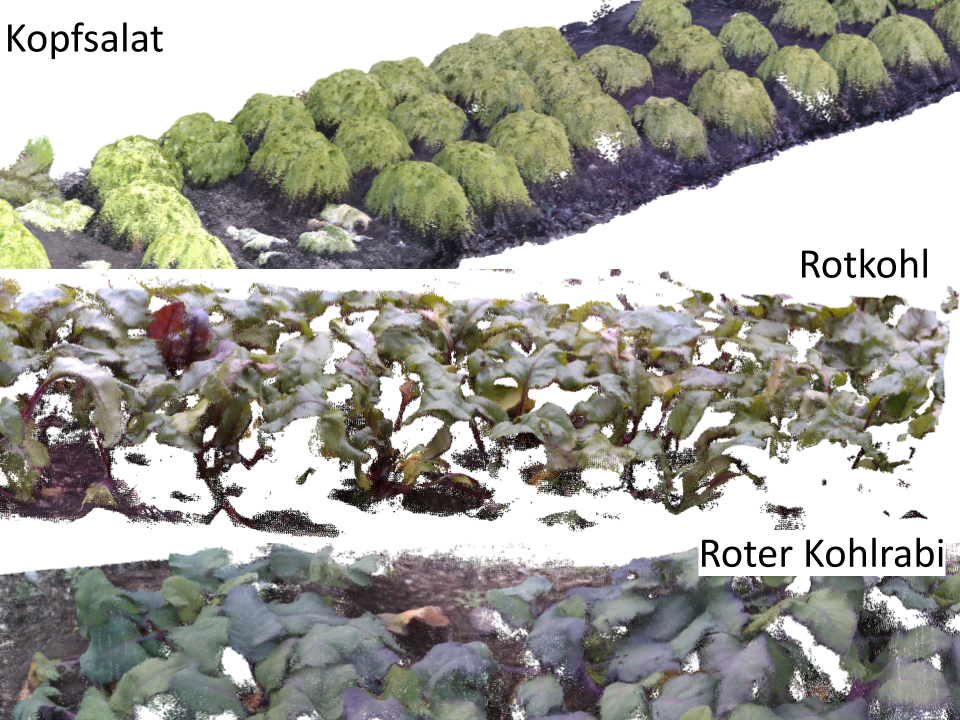
Die Vielfalt im biointensiven Anbau zeichnet sich nicht nur durch den Anbau von mehr als 30 verschiedenen Gemüsesorten aus - auch die Natur profitiert davon. So leben Pflanzen und Insekten in Symbiose miteinander. Die Bodenaufbereitung ist ein weiterer zentraler Baustein - so trägt Kompost z.B. zum notwendigen Humusaufbau bei. Der Erhalt und die Förderung der Bodenfruchtbarkeit sind für einen erfolgreichen biointensiven Anbau unverzichtbar. Auf weniger als einem Hektar Fläche im biointensiven Anbau kann ein Betrieb rentabel wirtschaften. Häufig fehlt potentiellen Interessenten jedoch das agronomische Wissen, um einen eigenen Betrieb aufzubauen…


Use Cases
Unsere Technologie lässt sich nicht nur im Kontext von Mikrofarming anwenden, sondern beliebig skalieren und an andere Use Cases anpassen.

Mikrofarming
Diese Anbaumethode wird auch als biointensiver Anbau bezeichnet und kann etwa 200-mal so viel Gewinn pro Hektar abwerfen wie ein durchschnittlicher konventioneller Betrieb.

Agroforst
Diese uralte Nutzungsform ist kein innovatives Konzept, sondern ein in Vergessenheit geratendes System, in dem Bäume und andere mehrjährige Pflanzen auf einer landwirtschaftlich genutzten Fläche integriert werden.

Konventioneller Anbau
Auch die Interessent:innen aus dem konventionellen Gemüsebau wollen wir mit unserem Lösungsansatz unterstützen, biointensive Anbaumethoden als Alternative oder Ergänzung zum bestehenden Angebot in Erwägung zu ziehen.

Weinbau
In Deutschland wird in 13 Weinanbaugebieten auf rund 100.000 Hektar Rebfläche angebaut. Ein Großteil der durchzuführenden Arbeiten belaufen sich auf den Rebschnitt und die Ernte. Unsere Technologie kann diese Prozesse effizienter und zielgerichteter gestalten.

Blog

Nature Robots hat den DurchSTARTer-Award 2023 gewonnen

Nature Robots gewinnt den German Agri Startup Award 2023